加藤 龍 先生編(専門:医療福祉ロボット分野/研究テーマ群:応用AI)
今回のインタビューはロボット工学がご専門の加藤 龍先生にお伺いします。
Q. 加藤先生のご専門はどのような分野でしょうか。
加藤 「ロボット工学」が専門で、その中でも「サイバーロボティクス」と呼ばれる分野になります。人やロボットを中心に、いわゆるメカトロニクスや情報工学、脳神経科学などの異分野を複合融合するような学問領域です。
中でも私が20年以上にわたって研究しているのは、人の身体に装着し身体機能の代償や補助,拡張を行う医療福祉用のロボットです。例えば、事故や病気などで手が切断されてなくなってしまった人向けのAIを搭載したロボット義手や、外科手術の際に体に開ける穴(傷)が最小限で済むよう、ロボットハンドを細長く形状を変形させ体内に入れて処置を行う手術支援ロボットなどを研究・開発しています。
ロボット義手というのはいわゆる「筋電義手」です。手を切断してしまった人でも、手指を動かす腕の筋肉は残っていることが多く,その筋肉が収縮する際に発生する微弱な電気信号(生体信号)をセンサーでキャッチし、手の代わりに電動のロボットハンドを動かす、というシステムです。
研究を始めた20年ほど前は、義手を動かすシステムのサイズが畳一畳分ほどもあり、とても人が装着できるレベルのものではありませんでした。また、筋電義手そのものはドイツ製のものがあるにはありましたが、手先が開閉するだけの原始的なもので重量も重かったため、ほとんど普及はしていませんでした。
それが20年の歳月を経て、ロボット技術もセンサー技術も大きく進化しました。例えば我々の研究グループが開発しているロボット義手は、個人への学習機能(AI)が搭載され、多指(5本の指)が動かせるものです。この技術や部品は、厚生労働省の「義肢装具等完成用部品」に指定されており、実際に義手製作を行う全国の義肢装具メーカーに提供することが可能になりました。
とはいえ、まだピアノが弾けるほど繊細に指を動かせる筋電義手はできていません。より細やかな指の動きをどう実現するか、あるいは力の入れ具合を調整するにはどうすべきか、このあたりは現状の課題ですね。今は主に筋電義手にAIを組み合わせ、装着した人がどういう動きをしたいのかを推定して自然な操作感で正確に動かすための研究を行っています。

Q. 研究テーマの魅力、エキサイティングな点を教えていただけますか。
加藤 前述の通り、私が研究しているのは人間の身体機能を代償・補助・拡張する医療福祉向けのロボットですが、全身ではなく上肢(肩関節、上腕、肘関節、前腕、手関節、手指)を対象としています。というのは、全身を支えバランスをとるのが機能の主とする下肢に比べ、上肢、特に手は様々なモノを把持・操作をしたり,モノに触って感じたり,コミュニケーションに使用したりと機能が多岐にわたり,人工的に実現するのが非常に難しいのです。
例えばパラリンピックを例にとると、車いすテニスの試合や、義足で走る陸上競技をイメージする人が多いのではないでしょうか。つまり上肢に問題を抱えながら上肢を使うスポーツをする選手はほとんどいません。それほど上肢というのは構造が複雑で人工的に再現しにくいわけです。
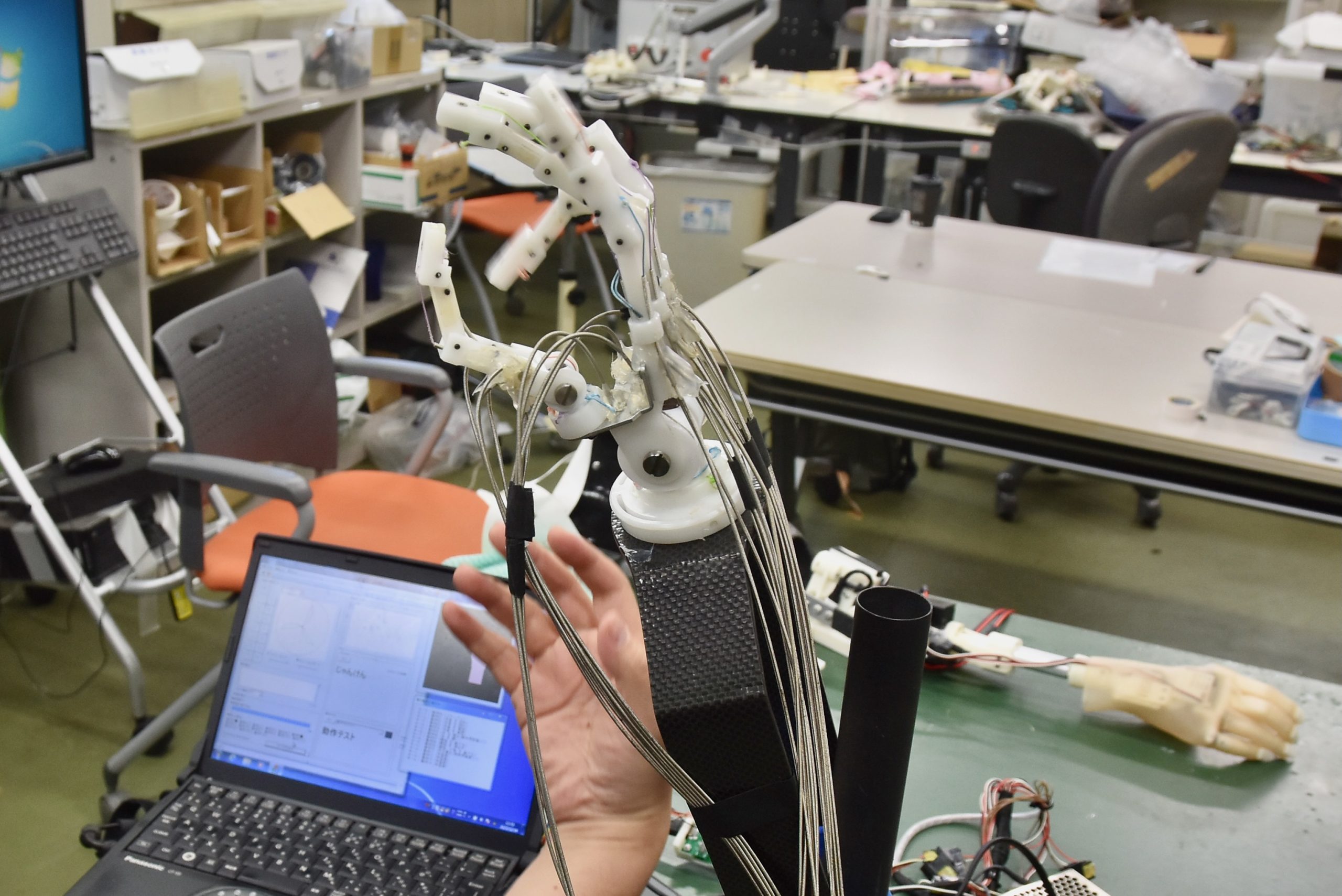
特に“手”はその最たるもの。手の中だけで20種類以上の関節があり、筋肉も前腕部に10種類以上あります。その筋肉を腱がワイヤーのように引っ張って動かしているのですが、逆に言えば、関節や筋肉の数が多い分、そこから正しく情報を読み取り、正確に制御できるロボット義手を作るのも難しいということです。
一例を挙げると、お茶碗は一般的には下から包み込むように持ちますよね。しかしカニの爪のように手が開閉するだけの義手では茶碗を持つことができません。そのため、古いタイプの義手を使っている人は、茶碗を机においたまま口を近づける姿勢で食事をするしかなく、外食などの際に人目を気にする人が多くいました。これに限らず、多指・多関節が動かせるようになるだけで、あらゆる場面で日常生活がすごく自然に送れるようになります。
そもそも人間は手を使うことで脳を発達させ、ここまで進化してきた動物。ある意味、手は人間の知能を具現化したものとも言えます。その手を失った人に違和感のない日常生活を送ってもらうため、いかに人工物として再現するか考えることは、いわば“神の領域”に挑戦するようなことでもあります。非常にチャレンジングでやりがいのある仕事ですね。
Q. 学外での活動について教えてください。
加藤 主に整形外科やリハビリ科など医療機関のお医者さんたちと協働し、そこにいらっしゃる患者さんたち、例えば事故で手を失った方や、先天性欠損のお子さんらのために筋電義手を提供し、問題なく動いているかを定期的に臨床評価していく、というような活動をしています。
現状で言えば、肘と手首の間で切断された人のための前腕の筋電義手はある程度の実用化ができたのですが、いまメインで取り組んでいるのは、上腕部(肘の上)まで切断してしまった人(高位切断者)のための筋電義手です。手指を動かす筋肉のほとんどは、肘と手首の間の前腕部にあります。つまり生体信号を読み取る手段がなくなってしまうため、こうした患者さんにはこれまで筋電義手を適用できなかったのです。
しかし、肘の上まで切断した場合でも、肘の上にある上腕二頭筋・三頭筋や、手指につながる神経は残っています。最近は、この残った神経を、上腕二頭筋・三頭筋の一部に移植する「Targeted Muscle Reinnervation(TMR,標的化筋肉再神経分布)」という手術を施すことで、肘から下の腕がない場合でも筋電義手を動かせるようになってきました。
そこで今、高位切断者向けの筋電義手の実用化に向けて、東海大学医学部付属病院の整形外科・リハビリテーション科の先生たちと共同で、4名の患者さんに使ってもらいながら臨床評価を行っているところです。
将来的には、見た目だけでなく、実際に使うときに普通の手と同じように違和感なく自然に使える筋電義手を作りたいですね。
Q. 最後に志望する学生にメッセージをお願いします。
加藤 先進実践学環は“文理融合・異分野融合”のポリシーを掲げているわけですが、それで言えば、ロボット工学自体が情報工学や機械工学、電気工学などの分野が融合してできたものです。
さらに私の研究室は医学との連携も行いますから、まさに異分野融合をそのまま体現していると言えます。ですから、なるべく多面的な視点を持つ人に学びに来て欲しいですね。そして普段から多面的・客観的に物事を考えるトレーニングを積んで欲しいなと思います。
そしてもう一つ、最近、私が懸念していることがあります。それは“モノづくり”に対して恐怖を感じている学生が増えていることです。ものを作るときに、最初から完璧なものを目指しすぎているせいか、失敗を恐れてどこか及び腰になっている学生が多いのです。
しかし創造に失敗は付きもの。怖がらずに「とりあえずやってみる」という精神が大切です。私も数々のロボットを作っては失敗し、それでもめげずに挑戦し続けたからこそ今があります。ぜひ何事にも恐れずに、どんどんチャレンジする精神力と行動力を身につけてください。
